
自動運転を支えるロボット技術
Robot Technology that is One of the Important Key-Technology of Self-Driving Cars

[PROFILE]
○研究分野/ロボット工学、制御工学
○研究テーマ/自律移動ロボットのナビゲーション、非線形フィルタESDSによる加速度推定と制御への応用
○研究室ホームページ
http://mech-hm.eng.hokudai.ac.jp/~rd/
Takanori Emaru : Associate Professor
Laboratory of Robotics and Dynamics
Division of Human Mechanical Systems and Design
○Research field : Robotics, Control Engineering
○Research theme : Navigation of autonomous mobile robot,
Estimation of acceleration using nonlinear filter ESDS and its application to control
○Laboratory HP :
http://mech-hm.eng.hokudai.ac.jp/~rd/
未来の自動運転を実現する
ロボット技術「SLAM」
近年、アダプティブクルーズコントロールや自動ブレーキ、自動駐車など、運転の部分的な自動化が実現しつつあります。これらの技術を実現するためには、自動車の周囲の状況を多くのセンサで把握し、その情報をコンピュータで処理しながらどのように動いたらよいかを計算し、障害物を避けつつエンジン、ブレーキ、ステアリングの制御を行うことが必要となります。
いまよりもさらに進んだ、未来の自動運転を実現するための鍵となる技術の一つが、ロボット工学で研究されているSLAM(Simultaneous Localization and Mapping)と呼ばれる技術です。SLAMとは、自分の位置(自己位置)の推定と地図の作成を同時に行う技術です。現実世界では予測不可能なことが次々と起こり得るため、事前にどのように動いたら良いかをプログラミングしておくことはできません。そこで、自動車が移動しながら地図を作ることが必要となってきます。
 図1 2次元SLAMによる環境マッピング
Figure1:Mapping result using 2D-SLAM technique
図1 2次元SLAMによる環境マッピング
Figure1:Mapping result using 2D-SLAM technique
ゲームでおなじみの機器を活用
目指すはロボット間の協調も
SLAMの研究は、ロボットが平面を移動して2次元的な地図を作成するところから始まりました(図1)。最近はより実用的なSLAM技術の実現を目指し、3次元SLAMの研究が盛んに行われています。周囲の環境を得るためのセンサとして、レーザースキャナやカメラなどが用いられています。我々の研究室では、安価なセンサとしてゲーム機器で用いられているkinectを利用した3次元SLAMの研究開発を行っています(図2)。さらに、より知的な行動をロボットに行わせるために、複数ロボット間の協調問題などにも取り組んでいます。
これらの研究が進むことによって「ロボットの知能化」と「ロボット間の知的な協調」が実現できれば、渋滞を無くし、時間やガソリンの無駄を減らすことと安全性の両立が可能となります。また、このような技術は、工場で使われる搬送ロボットや身の回りで働くサービスロボットなど幅広い分野への応用が期待されています。
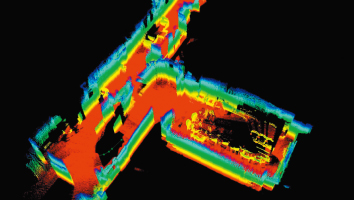 図2 3次元SLAMによる環境マッピング
Figure2:Mapping result using 3D-SLAM technique
図2 3次元SLAMによる環境マッピング
Figure2:Mapping result using 3D-SLAM technique
| アダプティブクルーズコントロール | 定速走行・車間距離制御装置。 高速道路や自動車専用道路を前提に開発された。 |








