
生物に学ぶ移動ロボット
Biomimetic Mobile Robots
[PROFILE]
○研究分野/スマートメカニズム、ロボット工学、機械製作学
○研究テーマ/移動ロボット機構
○研究室ホームページ
http://labs.eng.hokudai.ac.jp/labo/lsm/
Hiroyuki Harada : Associate Professor
Laboratory of Smart Mechanism
Division of Human Mechanical Systems and Design
○Research field : Smart mechanism, Robotics, Manufacturing engineering
○Research theme : Mechanical design of mobile robots
○Laboratory HP :
http://labs.eng.hokudai.ac.jp/labo/lsm/
http://labs.eng.hokudai.ac.jp/labo/lsm/
ヘビや魚、生物の移動方法を
機械で実現してみると?
私の主な研究テーマは、バイオミメティクス(Biomimetics:生物模倣)といいます。そのなかでも特に生物の移動方法に注目し、ヘビのように身体をくねらせたり、ミミズのように伸び縮みしたり、魚のように尾ひれを振ったりして移動するロボットを研究しています。
生物の移動方法を機械に取り入れると、どんな利点があるでしょうか?たとえばヘビを真似ると、地上ばかりでなく、木の上、砂漠、水中など、環境を選ばずに活動できるロボットが生まれます(図1)。さらに、ヘビ型ロボットは、モジュラー構造という、同じ造りのユニットを一列に接続した構造にできます。すると、部品を共通化できるので、故障に対処しやすくなります。このような、実際の生物にはない、機械に特有の価値が生まれるのも興味深い部分です。

図1 車輪を持たず地面を這って進むヘビ型ロボット
Figure1:A snake robot without wheels; crawling on the ground
アクチュエータの特性を活かし
スマートに動くロボット設計
ロボットを動かす「筋肉」の働きをする要素をアクチュエータといい、電気モータが最も普及しています。一方で、加熱すると収縮するといった特殊な素材の性質を利用したアクチュエータの開発も盛んになっており、その一例がSMA(Shape Memory Alloy:形状記憶合金)です。SMAは室温では自由に変形しますが、ある温度以上に加熱すると、記憶している形状に戻ります。これをワイヤーにして電気を流すと、ジュール熱(ニクロム線の加熱と同じ原理)によって収縮するアクチュエータが出来上がります。動きが筋肉と似ているので人工筋肉と呼ばれることもあります。筋肉のようなアクチュエータが、生物のような構造のロボットと相性が良いと考えるのは、自然なことです。
このようなアクチュエータを用いると、動作音の全くないロボットや、身体に占めるアクチュエータの割合がとても小さいロボットを作ることができます(図2)。私たちの研究室ではSMAに細かい電圧パルスを送って、よりなめらかな動きを実現したり、特別なセンサなしに状態を監視したりする技術を応用しながら、シンプルな構造をスマートに動かすロボット技術の開発を目指しています。
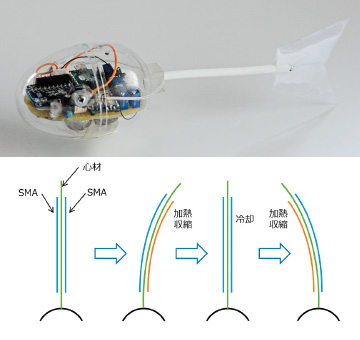
図2 SMA駆動の尾ひれをもつ魚型ロボットとひれの動作原理。写真の白いチューブにSMAワイヤーと芯材が通っている。
Figure2:A fish robot with a SMA-driven tail fin, and how to move the fin. SMA wires and a core wire are in the white tube shown in the photograph.
| バイオミメティクス | 生物が進化の過程で獲得してきた優れた構造や機能を、 工学や医療分野に応用する取り組み。 |








