- HOME
- Wow! Cool Laboratory [Researcher Introduction]
- Takanori Emaru
Wow! Cool Laboratory [Researcher Introduction]

Division of Human Mechanical Systems and Design,
Research Group of Biomechanics and Robotics,
Laboratory of Robotics and Dynamics
Field of research: robotics, control engineering
Research themes: sensing and signal processing for autonomous mobile robots, the estimation of acceleration using an ESDS nonlinear filter and its application to control
E-mail: emaru[a]eng.hokudai.ac.jp
Aiming for the realization of high-precision sensing and navigation by supplementing ultrasonic/laser sensor measurement values with software
Development of control technology using a nonlinear filter
In the design of high-performance machines, dynamics and vibration property analysis, although often overlooked, are important, and the dynamic property analysis and control of information instruments and robots are important themes. Advanced control is also indispensable for mechatronic systems, as typified by robots. The Laboratory of Robotics and Dynamics is engaged in research in both robotics and dynamics, with the aim of achieving the dynamic behavior analysis and control system design of robots and mechanical systems that have a flexible and/or unstable mechanism.
Associate Professor Takanori Emaru focuses on research on robotics and develops environmental information sensing and signal processing algorithms for autonomous robots to achieve robot systems that are easy to use.
First research topic is about a novel filter that realizes noise reduction and estimation of differential value simultaneously. This technology is used for the navigation system, allowing a mobile robot equipped with ultrasonic sensors to measures structure and objects in the environment. In the measurement of the environment using ultrasonic sensors, ultrasonic waves reflected from objects other than the target object are received as noise. We have developed a filter to remove this noise using signal processing technology (Figure 1). Our proposed method is constructed based on the sliding mode system that is one of the nonlinear theory, and is called ESDS. The use of a linear filter makes mathematical analysis easier, but makes processing complicated if the noise has an effect on the entire frequency range. Nonlinear filters can effectively remove a variety of noises because they enable processing regardless of frequency (Note 1).
Associate Professor Emaru also conducts research on attitude control and digital acceleration control that is robust against changes in tip mass in the development of industrial manipulators used for bridge inspection robots and other machines.
“The merits of digital acceleration control lie in robustness against nonlinear terms, which are hard to model, and the minimal difference between a simulation and a real machine as the result of little influence of modeling error due to friction terms. As a demerit, the fact that it requires not only first-order differential values but also second-order differential values can be cited (angle, angular velocity and angular acceleration values are also needed for manipulators). If you use sensors for all these values, it is expensive and requires high maintenance. So, we use the above-mentioned ESDS to estimate differential values to control acceleration without increasing the number of sensors. We are now advancing research to improve the accuracy of differential value estimation.”
Development of low-cost, safe integral ultrasonic sensors
Another of his research themes is the development of a navigation system using integrated values. In measuring the distance to the target object using an ultrasonic sensor, the distance to the object is measured by the time it takes for ultrasonic waves to reflect off the object and return. The system is designed to allow robots to navigate by using integration values of reflected waves.
“An ultrasonic sensor installed in a robot is rotated 180 degrees while the distance is measured, then the integrated values of reflected waves are compared. It is considered that small values indicate open space without obstacles, so the robot moves ahead following the values. By repeating this operation, the robot can move while avoiding obstacles.”
This technology enables robot control with only a low-cost ultrasonic sensor and without using advanced sensors. It also makes it possible to control the moving velocity by identifying the size of the open space ahead.
“Ultrasonic sensors are cheaper than laser sensors and have no impact on the human body and animals. Accordingly, it is expected that they can achieve low-cost, safe robot navigation. There are some issues, however, including velocity adjustment that takes into consideration robot acceleration (motor power) and control methods when reflected waves cannot be obtained due to the shape of obstacles. We would like to resolve these issues.”
He is also working on the development of (1) an intelligent walking support machine to control the movement of the wheels of walkers for the elderly and those in need of nursing care, (2) SLAM (simultaneous localization and mapping), by which a robot collects information in the environment for mapping (Note 2), and (3) a pier inspection method using a drone.
“The pier inspection method in (3) has attracted attention in recent years. Roads, tunnels, bridges and piers that were constructed in the high-growth period have rapidly become older, and the development of robots that inspect and repair them is urgently needed. However, although technology for bridges or tunnels is under development, there is no technology that is applicable to piers. It is expected that our research will contribute to this field.”
| Note 1. | Measurements in Crosstalk Situations (measurements obtained by removing noise caused from the interference of multiple robots) Results (right hand graph) (Figure 2) of calculations for changes in the distance to the target after using a nonlinear filter to remove noise from measurements (left hand graph) showing values that are shorter than actual distances due to noise caused by ultrasonic waves from robots that are close to each other. |
|---|---|
| Note 2. | In robotic mapping, simultaneous localization and mapping (SLAM) is the problem of constructing or updating a map of an unknown environment, especially in indoor environments where GPS cannot be used. This method enables high-precision self-localization and mapping through mutual feedback between self-location information and map information. |
Experimental mobile robot
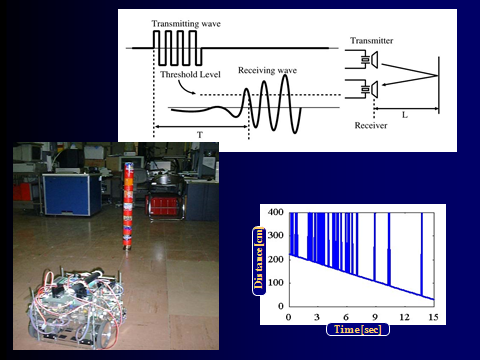
Figure 1. Noise Reduction Filters
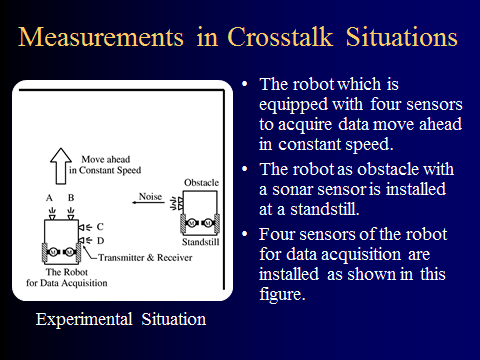
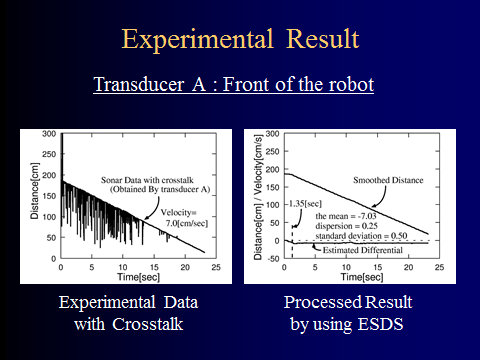 Figure 2. Measurements in Crosstalk Situations
Figure 2. Measurements in Crosstalk Situations