すごいね!クールラボラトリー[研究者紹介]
システム創成学分野 ヒューマンセントリック工学研究室
○研究分野/機械力学、メカトロニクス、ロボティクス、知能機械システム、ヒューマンインタフェース、インタラクション、データベース、ものづくり技術(機械・電気電子・化学工学)、計測工学
○研究テーマ/パワーアシスト、筋骨格モデル、筋活動センシング など
○E-mail/ttanaka[a]ssi.ist.hokudai.ac.jp
ロボットと人間の適切な共存関係を構築する
「ひとにちょうどいいシステム」を目指して
作業の一部をサポートし身体機能を維持・補強する
ロボットシステムが人間と共存し協調するためには、実世界環境で稼働するセンシング・制御・システム化技術が必須である。田中孝之教授をリーダーとするヒューマンセントリック工学研究室は、ヒューマンロボティクスに基づき、ロボット・メカトロニクス、計測工学、人間工学をベースとしたウエアラブルロボット、ウエアラブルセンサ、人とロボットの協調、人間拡張技術などの研究を行っている。
コンセプトは「ひとにちょうどいいシステム」。田中教授は「私たちの考えるロボットシステムは、人間の行う作業の一部あるいは身体能力を適度にアシストすることで、身体的負担の大きい作業を“軽労化”するのが目的です」と語る。農業、介護、物流、建築、製造などの分野では、人の手による作業、人だからこそできる作業が多く、完全にロボット化することは難しい。そこで、労働による傷病リスクを下げるとともに、主体的な動きをサポートすることで、働き続けられる身体能力を維持するための軽労化スーツ「スマートスーツ®)」を開発(脚注1)。2008年10月に北大発ベンチャー起業の(株)スマートサポートを設立し、さまざまな分野へスマートスーツ®を提供している。また、同研究室では産学協同の「軽労化研究会」という組織も設立し、軽労化技術の研究開発と社会への普及に取り組んでいる。
※「スマートスーツ」は株式会社スマートサポートの登録商標
作業負担を可視化し適切にアシスト
スマートスーツ®と並行して開発を進めてきたのが、作業負担可視化のためのウェアラブルセンサ(脚注2)である。ニコン株式会社と共同開発したセンシングウェア®は、荷物の上げ下ろしなどの際に腰にかかる負担を計測・推定する「着るレントゲン」ともいえる機能を持つ。腰に巻くだけで負担を計測することができるため、作業者の労務管理などに有効で、産業衛生の分野から注目を集めている。
また、アシストウェア®はセンサで姿勢と筋活動を計測、人工知能で腰の負担を予測し、負担に応じて自動で骨盤を締め付けることができる。
「作業負担を見える化することで、作業に潜む危険を察知するだけでなく、作業の行われている環境やそこで働く人の身体的機能を考慮した作業形態の最適化を図ることも可能になると考えています」
※「センシングウェア」と「アシストウェア」は株式会社ニコンの登録商標
介護現場の作業を自動化・サポートする技術の開発
現在田中教授が着目しているのは介護現場での支援システムである。「介護施設では、利用者に対しさまざまな介護作業が行われていますが、いつどのような作業を行ったかを記録することが義務付けられており、介護記録の記入にかなりの時間と労力を割いています。私たちは、ウェアラブルセンサを使って作業内容を認識することで介護記録の自動化ができないかと考えています」
研究チームは、介護者が利用者をベッドから車椅子へ移乗させる際の一連の動きをセンサで計測し、統計的にモデル化。それと同等の動きをした場合を「移乗作業」として認識する(脚注3)。介護施設での実証実験では、実際に行われた移乗作業を高精度に検知することができ、介護の現場から大きな期待が寄せられている。
また、ロボット車椅子による支援システムでは、介護者や利用者の状態や動きに応じてロボット車椅子が自動的にベットに近寄るなど、人とロボットが協調したシステムの構築に取り組んでいる。
「介護の現場では介護者の人材確保がますます重要になっており、今後はスタッフの高齢化とともに、リタイアした人たちが新たに介護施設のスタッフとして採用されるケースが多くなると思われます。熟年層以上の初心者でも短期間の研修で現場に立つことができ、しかも衰えつつある身体に負担をかけずに介護作業に従事できる。そういう環境を整えることが今後ますます必要になってくるのではないでしょうか。私たちが研究を進めている技術は、そうした健康労働寿命の延伸にも貢献できると考えています」
| 脚注1 | スマートスーツ® 農業や漁業、介護、重い荷物の持ち運びなどの中腰姿勢での作業をアシストし、身体機能を維持するための装着型筋力補助装置。弾性体(ゴム材)を後背部に配置することによって、腰をかがめた時に、弾性体の収縮力で上体を引き起こすアシスト効果と体幹を安定化させるコルセット効果を発揮。これにより腰の負担が25%軽減されることが証明されている。 
|
|---|---|
| 脚注2 | 作業負担を可視化するウェアラブルセンサ ベルト状の装置に小型センサを内蔵し、腰の曲がり具合を計測。背骨の骨と骨の間にある椎間板がどの程度圧迫されているかを計測・数値化。椎間板が強く圧迫されると腰痛につながるため、腰を痛める可能性のある姿勢をとると警告を発することもできる。 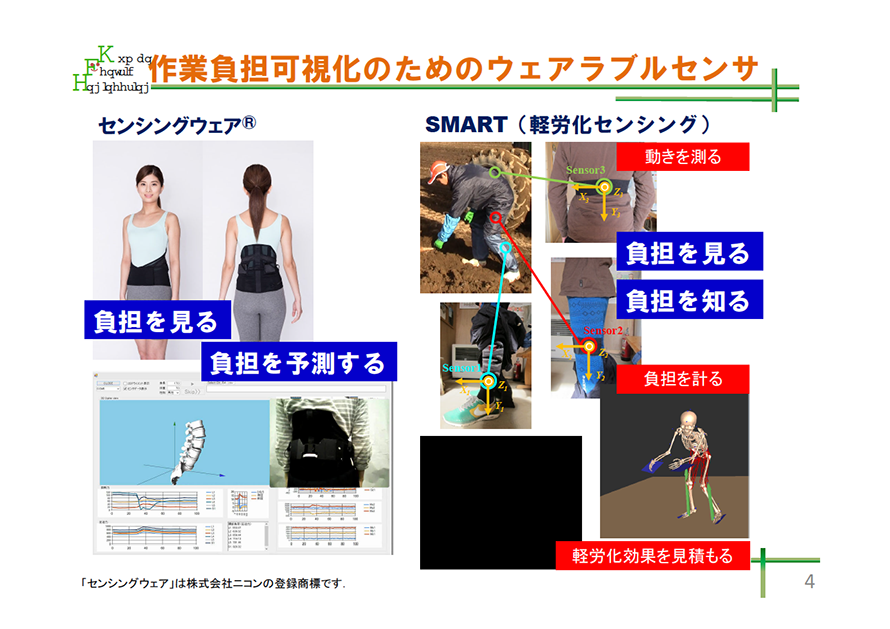
|
| 脚注3 | ベッド⇔⾞いす間の移乗作業の認識システム ベッド⇔⾞いす間の移乗作業は、柵上げ・柵下げ、⾞椅⼦準備、靴(履かせる&脱がせる)、フットサポート操作、起⽴介助、起き上がり・横たわり補助などの細かな介助作業がつながったものである。これら一連の作業のつながりをコンピュータが解析し「移乗作業である」と認識することを可能にした。 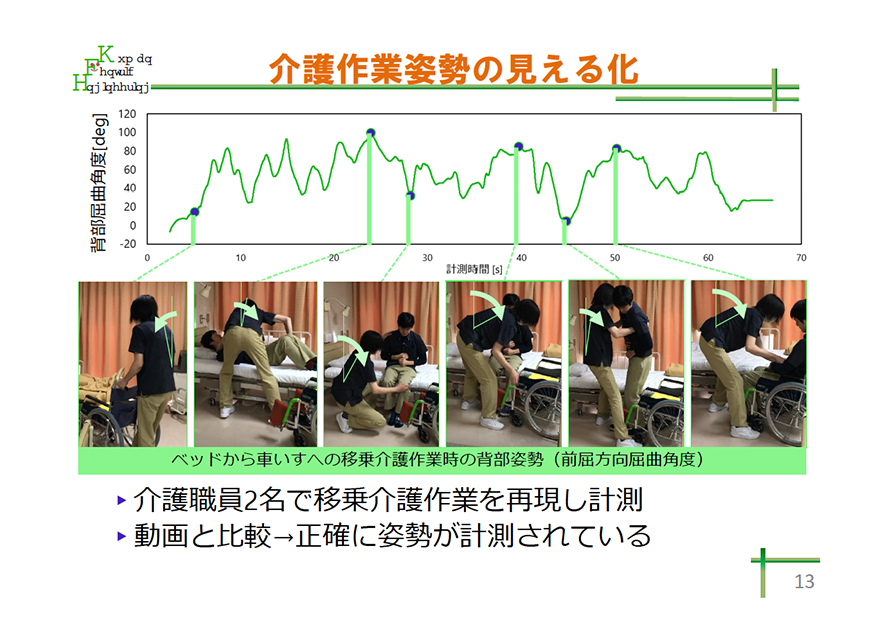
|
 ウェアラブルセンサで腰への負担をリアルタイムで計測・解析。負担を見える化することで危険の察知や筋力の補助、腰痛の予防などに役立てることができる。 |