すごいね!クールラボラトリー[研究者紹介]

バイオ・ロボティクス分野 ロボティクス・ダイナミクス研究室
○研究分野/ロボティクス、制御工学
○研究テーマ/自律移動ロボットのセンシング・信号処理、非線形フィルタESDSによる加速度推定と制御への応用
○E-mail/emaru[a]eng.hokudai.ac.jp
○Tel./011-706-6409
超音波・レーザセンサの測定値をソフトウェアで補い
高精度なセンシングとナビゲーションの実現を目指す
非線形フィルタを使った制御技術の開発
高性能な機械の設計においては,従来あまり考慮の対象とならなかった動力学や振動特性の解析が重要であり、情報機器・ロボットなどの動力学的特性の解明や制御の問題が重要なテーマとなっている。また、ロボットに代表されるメカトロニクスシステムでは高度な制御が不可欠だ。ロボティクス・ダイナミクス研究室では、特に柔軟な構造や不安定な構造を有するロボットや機械システムの動的挙動の解析と制御系設計を目標とし、ロボティクスとダイナミクスの両面で研究を行っている。
江丸貴紀准教授は、その中でもロボティクスの研究に取り組み、環境情報を得るためのセンシングやその信号処理などを中心にロボットの自律化を行い、誰にでも使いやすいロボットシステムの実現を目指している。
「第一の研究テーマは制御手法の一種であるスライディングモードシステムの考え方を使ったノイズ除去・微分値推定技術で、移動ロボットに超音波センサを搭載して周囲の構造や物体を測定するナビゲーションシステムに使われています。超音波センサを使って周囲を測定すると、目標とする物体以外から反射した超音波がノイズとして受信されます。それを信号処理の技術を使って除去するフィルタを開発しています(図1)。このフィルタの特徴は、非線形のフィルタ(ESDS)を構成する点にあります。線形フィルタを使った方が数学的な解析は簡単なのですが、ノイズが全周波数に渡って影響していると処理が煩雑になってしまいます。非線形フィルタは周波数に関係なく処理できるので様々なノイズを効果的に除去できます(脚注1)」
また、橋梁点検ロボットなどに使われる産業用マニピュレータの開発では、姿勢制御や先端質量の変化にロバストに対応するディジタル加速度制御の研究を行っている。
「ディジタル加速度制御のメリットは、モデル化困難な非線形項に対してロバストであることと、摩擦項などのモデリング誤差の影響が少なくシミュレーションと実機との差が小さいことです。デメリットとしては一階微分値だけでなく、二階微分値も必要である(マニピュレータの場合は角度,角速度,角加速度が必要)点です。そのすべてにセンサを使用するとコストやメンテナンスなどの面で支障が出るので、センサの数を増やさずに制御するために前述のESDSを使って微分値推定します。現在は微分値推定精度の向上を目指した研究を進めているところです」
低コストで安全な積分型超音波センサの開発
もう一つの研究テーマは積分値を使ったナビゲーションシステムの開発。超音波センサで目標物との距離を測定するとき、超音波が物体に反射して戻ってくる時間によって障害物までの距離を測るが、その距離値を積分した値を使ってロボットをナビゲーションする技術である。
「ロボットに搭載した超音波センサを180度回して測定し、反射波を積分した値の大きさを比較します。このとき値の小さい部分は障害物がなく空間が開けていると判断できるので、その値に従ってロボットが前進します。この作業を繰り返すことで、障害物を避けながら移動することができるのです」
この技術を利用すると、高度なセンサを多用しなくても安価な超音波センサだけでロボットを制御することができる。また、前方にどれぐらい開空間があるかを知ることで移動速度を制御することも可能だ。
「超音波センサはレーザに比べて安価であることと、人体や動物などへの影響がないことから低コストで安全なロボットナビゲーションが実現できると期待されています。ロボットの加速度(モーターの出力)を考慮した速度調整や、障害物の形状によって反射波が得られない場合の制御方法など課題もいくつかあるので、そのあたりをさらに高めていきたいと考えています」
その他にも、①高齢者・要介護者用の歩行器の車輪の動きを制御するインテリジェント歩行支援機の開発、②ロボット自身が周囲の情報を得てマップを作るSLAM(Simultaneous Localization and mapping)(脚注2)、③ドローンを使った桟橋の点検手法の開発などに取り組んでいる。
「③の桟橋の点検手法は近年注目されている分野です。高度成長期に建設された道路やトンネル、橋、桟橋などは近年急速に老朽化が進んでおり、これらの点検や補修を行う社会インフラ用ロボットの開発が急務となっています。しかし、橋やトンネルなどのそれぞれに特化した開発が進められ、桟橋用のロボットに応用できる技術はほとんどありません。私たちの研究はこの分野に貢献するものとして期待されています」
| 脚注1 | Measurements in Crosstalk Situations(2台のロボットの混信状態からノイズを除去した測定値) 近接したロボットから発せられる超音波がノイズとなり、実際の距離よりも短い値が出ている測定値(左のグラフ)を非線形フィルタを使ってノイズ除去を行い、目的との距離の変化算出した結果(右のグラフ)(図2)。 |
|---|---|
| 脚注2 | GPSのようなグローバルな位置情報を得ることができない環境で、ロボットが自己位置推定と地図作成を同時に行うための手法。自己位置推定情報と地図情報を互いにフィードバックし合うことで高精度な自己位置推定と地図構築を行うための手法である。 |
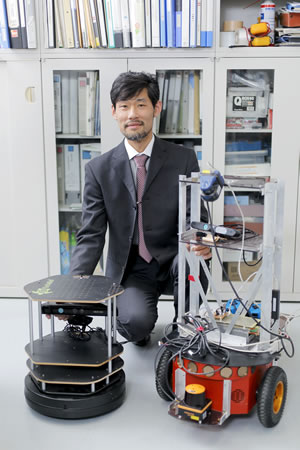
実験用移動ロボット
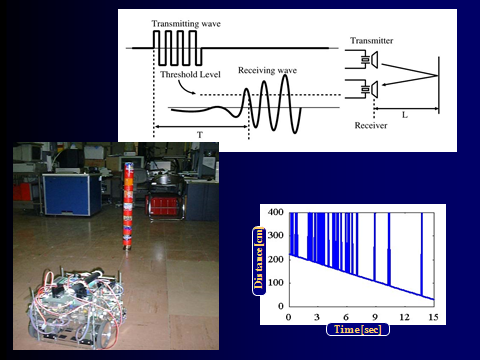
図1. ノイズ除去フィルタ
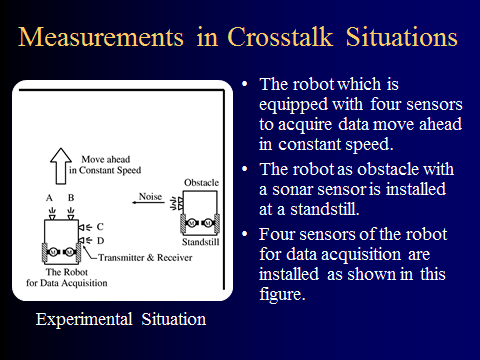
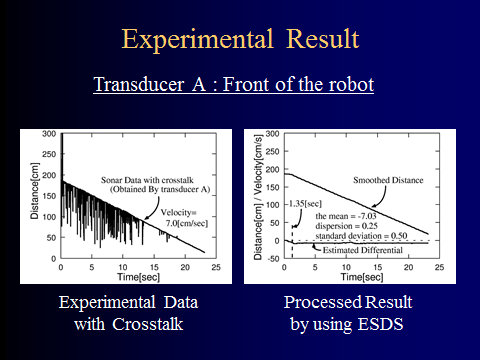 図2. Measurements in Crosstalk Situations
図2. Measurements in Crosstalk Situations