研究紹介
形態の変化によるロボット推進機構の開発
バイオ・ロボティクス講座
スマートメカニズム研究室
スマートメカニズム研究室
環境を選ばない推進機構,または特殊な環境に適応した推進機構として,ミミズのように身体を伸縮させる蠕(ぜん)動運動や,ヘビのように身体をくねらせる運動によって移動するロボット推進機構の開発を行っている. 蠕動運動機構については,右ねじと左ねじをひとつのねじ軸に設け,ねじ溝端部をつなげたクロスねじを用いて,単一方向のモータの回転運動を,位相の異なる往復直線運動に変換し,1モータによって駆動する方法などに取り組んでいる.

クロスねじによる蠕動運動機構
くねり運動機構については,簡単な車輪式ラジコンモデルを作成して様々な走行モードについて評価を行っている.さらに車輪を用いない,胴体推進を実現することによって,活動環境の拡大を目指している.

アコーディオン形走行モード
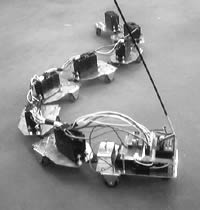
くねり推進機構のラジコンモデル