研究紹介
倒立振子系の安定化制御
バイオ・ロボティクス講座
ロボティクス・ダイナミクス研究室
ロボティクス・ダイナミクス研究室
倒立振子系の安定化制御
近年,自立歩行可能な二足歩行ロボットが盛んに研究開発されていますが,その歩行は高度な制御によって実現されています.二足歩行や棒の倒立は不安定な現象であり,安定化のためにはバランスを保つための作用が必要です.このような機構の研究には,倒立振子モデルが広く用いられています.当研究室では,小さなスペースで実験可能な旋回型の倒立振子実験装置を製作し,その力学的特性の解明と安定化制御に取り組んでいます.特に,旋回するアームが柔軟なはりの場合は,はりの振動が振子の振上げや倒立制御に対しては安定化を妨げる外乱となります.また,振子が振れる周期は振れ角に依存して変化する非線形性を有します.そこで,非線形振動解析を行い,振動特性を明らかにし,さらに振動制御の併用により振上げと倒立制御を実現しています.また,ジャイロセンサを搭載した車輪型自立移動ロボットの試作にも取り組んでいます.
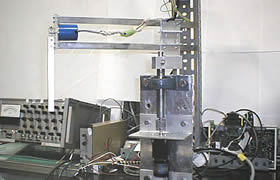
図2.1 柔軟アーム旋回型倒立振子

図2.2 車輪型自立移動ロボット