研究紹介
柔軟構造物の振動制御・力制御
ロボティクス・ダイナミクス研究室
柔軟構造物の振動制御・力制御
軽量で柔軟な機械構造が高速で運転されると,弾性振動が発生して高精度な位置決めの障害となります.また,ロボットアームが人や障害物に接触する場合には力を制御する必要があります.

図1.1 ゴルフスイングロボット
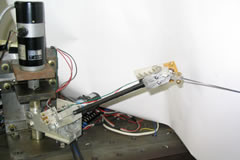
図1.2 バイオメタル駆動関節ロボット
当研究室では,柔軟な構造を有するロボットアームの振動や力の制御に関するシミュレーションと実験を行い,モデリングや制御手法に関する研究を行っています.また,高速駆動されるアーム型ロボットの一例として,ゴルフクラブをスイングするロボットを試作し,オブザーバによる状態推定手法の確立や,インパクト後の振動制御,あるいは停止時の衝撃緩和などに取り組んでいます.さらに,通電により筋肉のように緊張収縮―弛緩伸張運動する細線状のアクチュエータであるバイオメタルファイバーによって駆動される関節を有するロボットアーム運動制御の研究にも取り組んでいます.
空気アクチュエータを用いた除振システムの振動制御
精密加工装置などでは,外部からの振動を遮断するため空気アクチュエータで支持される除振台が広く用いられています.当研究室では,より高い除振性能とサーボ特性を実現するためのアクティブ制御手法を研究しています.特に,空気アクチュエータの動特性の同定,除振性能とサーボ特性両立のためのファジィ制御系の研究,さらには小型CPUユニットによるリアルタイム制御にも取り組んでいます.
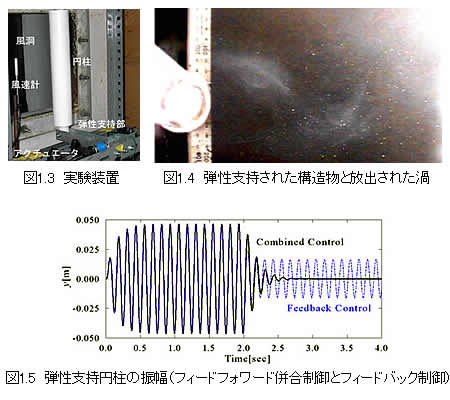
一様流中に置かれ弾性支持された弾性構造の振動制御
流体中に置かれた構造物は,その周囲に発生する渦により加振されて振動が発生し,時には構造物を破壊することもあります.このとき,渦放出周波数は構造系の固有振動数へ引き込まれ,揚力および抗力は静止物体が置かれたときに比べて大きく増幅されます.渦放出の抑制については,パッシブな機構によって渦の形成やはく離を抑える手法,後流の構造に着目したアクティブな手法などが試みられています.しかし,渦放出機構は複雑であり,流速や振幅に依存して変化する渦放出の形態や周波数に適応できる制御システムは提案されていません.そこで当研究室では,渦による励振力を推定し,フィードバック制御とフィードフォワード制御を併用することによって,外力を低減・相殺する制御系を構築するための研究を行なっています.
鉄道・農業機械における振動問題
鉄道は重要な大量輸送機関であり,高速化と安全性の向上に著しい発展を続け,乗客の乗り心地に対する要求は厳しくなっています.そこで当研究室では,防振軌道の動的特性の解明に取り組んでいます.また,農業規模の拡大と作業の効率化のために,農業機械の大型化と高性能化が進んでいます.大型の作業機械は柔軟構造物となるため,高精度な農作業および作業の安全性の観点から,振動抑制が必要となってきており,当研究室ではその課題に取り組んでいます.